TEMA V: SENSORES DIGITALES
1. Los codificadores de posición:
1.1 Codificadores incrementales:
1.2 Codificadores Absolutos:
1.3 Codificadores de posición angular
2. Codificador rotatorio
2.1 Codificador rotatorio absoluto
2.1.1 Construcción
2.1.2 Codificación binaria estándar
2.1.3 Codificación con código de Gray
2.2 Codificador rotatorio relativo
2.3 Codificador rotatorio limitado
3.1 Principio de funcionamiento de los sensores autorresonantes
3.2 Tipos de sensores autorresonantes
3.2.1 Sensores Basados en ondas superficiales
3.2.2 Galgas Acústicas
3.2.3 Cilindros Vibrantes
3.2.4 Sensores Resonadores de Cuarzo
3.3 Micro balanzas de cuarzo
3.3.1 Principio de funcionamiento de sensores de cuarzo
3.3.2 Circuito Equivalente
3.3.3 Construcción de microbalanzas de cuarzo
3.3.4 Sistema de acondicionamiento
3.3.5 Aplicación de microbalanza de cuarzo
3.3.5.1-Biomateriales
3.3.5.2- Superficies funcionales
3.3.5.3- Formación de capas delgadas
3.3.5.4- Surfactantes
3.4 Caudalimetro de Vórtice
3.5.- Otras Investigaciones Químicas
4. Problema practico industrial
4.1 Análisis de Compuesto del Agua
4.2 Usos
5. Otros métodos de detección.
5.2. Basados en ultrasonidos. Construcción y circuito de acondicionamiento
5.3 Basado en fibras ópticas. Construcción y circuito de acondicionamiento.
5.3.1 Ventajas De La Fibra Óptica
5.3.2 Parámetros De Una Fibra Óptica
TEMA V SENSORES DIGITALES

Figura 1 sensores digitales
Los sensores digitales se encuentran divididos en dos clases:
1. Los codificadores de posición:
Son aquellos que ofrecen directamente una señal digital a partir de una entrada analógica.
1.1 Codificadores incrementales:
Son codificadores que deben estar unidos solidariamente al elemento cuya posición desea medirse. Estos elementos poseen regularmente dos zonas, con propiedades únicas que las diferencian, cuya disposición es equidistante y alternativa.
La resolución de un sensor digital esta dado por:
 Donde D es el diámetro del disco y X es al ancho de cada sector codificado (Ver figuras 2,3y4).
Donde D es el diámetro del disco y X es al ancho de cada sector codificado (Ver figuras 2,3y4).
La simplicidad y economía de este tipo de sensores contrasta con los inconvenientes que presenta:
-Pérdida de información sobre la posición cuando falla la alimentación del sistema
-Pérdida de información en presencia de interferencias
-Requerimiento de electrónica especial, como contadores bidireccionales, para acondicionarlos a los elementos de análisis.
No detecta el sentido de avance si no se dispone de elementos adicionales como otra pista codificada, circuitos electrónicos y otra bobina sensora que dé una señal desfasada 90° respecto a la anterior y un detector de fase que dará una indicación del sentido de giro. Para circuitos ópticos y de contacto se añade una línea de sectores codificados que esté ligeramente desfasada con respecto a la primera y un elemento de lectura adicional.
Los codificadores incrementales pueden ser del tipo magnético, eléctrico u óptico y su salida puede ser en forma de tren de pulsos con un ciclo de trabajo del 50%.
Los magnéticos pueden ser de bobina e imán, de imán y sensor magnetorresistivo o de núcleo toroidal. Los codificadores eléctricos pueden ser capacitivos o de contacto. Los codificadores ópticos pueden estar basados en sectores opacos y transparentes, en sectores reflectores y no deflectores, o en franjas de interferencia. Éstos últimos normalmente cuentan con un LED infrarrojo y un foto detector (LDR: célula fotoeléctrica o fototransistor)
Un codificador incremental de rotación está formado por un disco con ranuras radiales ubicadas por lo general muy juntas en toda su circunferencia, o sino con líneas alternadas en color claro y oscuro, que giran frente a un foto sensor (o un conjunto de éstos, para más precisión), generando un pulso por cada ranura o cambio de color.
1.2 Codificadores Absolutos:
Los codificadores absolutos entregan una salida codificada que indica la posición del elemento móvil con respecto a una referencia. El elemento móvil cuenta con zonas que permiten distinguir y asignárseles valores de uno o cero.

Figura 2. Principio de funcionamiento de los codificadores de posición absolutos
La principal diferencia con los codificadores incrementales es que cuenta con varias pistas con zonas diferenciadas y agrupadas, de tal forma que el sistema de lectura obtiene directamente, en cada posición del elemento móvil, el número codificado que da su posición. Cada pista representa un bit de la salida, siendo la pista más interior la correspondiente al bit de mayor resolución.
Los sensores más utilizados en este caso son los ópticos, con zonas opacas y transparentes y en menor medida, los de contacto, con zonas conductoras y aislantes.
Los Codificadores de posición son relativos a la medida y control de posiciones lineales y angulares con alta resolución, por lo anterior se emplean en: robótica, grúas, válvulas hidráulicas, plotters, máquinas (figura 3) — herramienta, posicionamiento de cabezales de lectura en discos magnéticos y de fuentes de radiación en radioterapia, radar, orientación de telescopios, etc.
Las figuras 4 y 5 enseñan discos codificadores absolutos
Figura 3 Brazo robot

Figura 4 y 5 Disco codificador absoluto en un código pseudoaleatorio
Los codificadores absolutos ópticos funcionan con un concepto similar al de los tipos incrementales, sólo que poseen un disco con un dibujo complejo, distribuido en anillos concéntricos que representan los bits de una palabra binaria.
Deben tener un detector óptico por cada uno de estos anillos. Por ejemplo un disco con 8 anillos (como el de la figura 6), tendrá una resolución de 8 bits, o sea que podrá dividir su circunferencia en 256 porciones (más de 1 grado, si hablamos de ángulo). Un disco con más anillos concéntricos ofrecerá más bits de resolución y dará un dato de posición angular más preciso.
Figura6 discos de codificador incremental
1.3 Codificadores de posición angular
Los transductores de la posición angular de un eje son componentes fundamentales en la tecnología de control. Es difícil encontrar sistemas mecánicos industriales automatizados que no tengan varios ejes de movimiento angular o lineal. Utilizando un acoplamiento directo o algún tipo de acoplamiento mecánico que realice la adaptación, un codificador de la posición angular se puede utilizar en el monitoreo de cualquier tipo de desplazamiento.
Métodos de codificación
Listamos los tipos de transductores de posición angular de eje que son comunes en control industrial:
Figura 7 Diagrama de un potenciómetro.En verde, el anillo de resistor
Potenciómetros
Dentro de un potenciómetro normal encontraremos un anillo circular de material resistivo (resistor). Sobre el eje del potenciómetro hay un contacto que gira, deslizándose sobre este material resistivo. La resistencia eléctrica entre un extremo del anillo y el contacto es proporcional a la posición angular del eje.
Si se aplica un voltaje entre los extremos del resistor del potenciómetro, el voltaje en el contacto varía en relación directa con la posición angular del eje. Este voltaje se puede ingresar a un convertidor analógico-digital (A/D) para obtener el valor digital de la posición angular.
Comparando técnicas
Los potenciómetros son útiles para aplicaciones con precisiones entre 0,5 a 5 %. Son los dispositivos más baratos que existen para este uso. Debido a que están sujetos a desgaste mecánico, su aplicación se limita a productos hogareños y en industrias donde no es importante la seguridad y duración.
Los codificadores incrementales son razonablemente baratos. Se los usa extensamente en la industria, aunque su rendimiento es casi marginal en entornos críticos. Los discos se pueden quebrar si reciben impactos y se pueden producir errores por condensación. La volatilidad de su salida puede hacerlos no aceptables en algunas aplicaciones.
Los codificadores absolutos cubren un rango que va desde los medianamente costosos a los de alto costo, dependiendo de la resolución necesaria. Como sus similares incrementales, en algunas aplicaciones extremas pueden tener algunas limitaciones de performance.
Sirven para realizar mediciones generalmente de posición lineal o angular y pueden ser incrementales o absolutos.
2. Codificador rotatorio
Un codificador rotatorio, también llamado codificador del eje, es un dispositivo electromecánico usado para convertir la posición angular de un eje a un código digital, lo que lo convierte en una clase de transductor. Estos dispositivos se utilizan en robótica, en lentes fotográficas de última generación, en dispositivos de entrada de ordenador (tales como el ratón y el Trackba, y en plataformas de radar rotatorias. Hay dos tipos principales: absoluto y relativo.
2.1 Codificador rotatorio absoluto
2.1.1 Construcción
El tipo absoluto produce un código digital único para cada ángulo distinto del eje.
Se corta un patrón complejo en una hoja de metal y se pone en un disco aislador, que está fijado al eje. También se coloca una fila de contactos deslizantes a lo largo del radio del disco. Mientras que el disco rota con el eje, algunos de los contactos tocan el metal, mientras que otros caen en los huecos donde se ha cortado el metal. La hoja de metal está conectada con una fuente de corriente eléctrica, y cada contacto está conectado con un sensor eléctrico separado. Se diseña el patrón de metal de tal forma que cada posición posible del eje cree un código binario único en el cual algunos de los contactos esté conectado con la fuente de corriente(es decir encendido y otros no (apagados). Este código se puede leer por un dispositivo controlador, tal como un microprocesador, para determinar el ángulo del eje.
2.1.2 Codificación binaria estándar
Un ejemplo de un código binario en un codificador extremadamente simplificado con solamente tres contactos, se demuestra abajo:
Figura 8 ejemplo de codificación binaria estándar
Generalmente, si hay 'n' contactos, el número de posiciones distintas del eje es 2n. En este ejemplo, 'n' es 3, así que hay 23, es decir, 8 posiciones.
En el ejemplo anterior, los contactos producen una cuenta binaria a medida que el disco gira. Sin embargo, esto tiene la desventaja de que si el disco para entre dos sectores adyacentes, o los contactos no se alinean perfectamente, es imposible determinar el ángulo del eje. Para ilustrar este problema, se considera que el ángulo del eje cambia de 179.9º a 180.1º (sector 4 a sector 5). En cierto instante, según la tabla anterior, el patrón del contacto cambiará de "OFF-ON-ON" a "ON-OFF-OFF". Sin embargo, no sucede realmente. En un dispositivo práctico, los contactos nunca se alinean perfectamente, de modo que cada uno cambiará en diverso momento. Si el contacto 1 cambia primero, seguido por el contacto 3 y luego el contacto 2, por ejemplo, la secuencia real de códigos será:
*OFF-ON-ON (Posición de salida)
*ON-ON-ON (Primero, se activa el contacto 1)
*ON-ON-OFF (Después se desactiva el contacto 3)
*ON-OFF-OFF (Por último, se desactiva el contacto 2)
Ahora, mira los sectores que corresponden a estos códigos en la tabla. Así, de la secuencia de los códigos producidos, parece que el eje saltó del sector 4 al sector 8, entonces volvió al sector 7, y luego al sector 5, que es donde se esperaba encontrarlo. En muchos casos, este comportamiento es indeseable y podría fallar. Por ejemplo, si el codificador fuera utilizado en un brazo robótico el controlador pensaría que el brazo estaba en la posición incorrecta. Para corregir el error, intentaría girarlo 180º, pudiendo dañarlo.
2.1.3 Codificación con código de Gray
Para evitar el problema anterior, se utiliza el Código Gray. Éste es un sistema de código binario en el cual dos códigos adyacentes sólo se diferencian en una posición. Para entrar en contacto con el ejemplo dado arriba, la versión Grey-Cifrada será la siguiente:
Figura 9 ejemplo de codificación con código Gray
En este ejemplo, la transición del sector 4 al sector 5, como el resto de las transiciones, implica solamente uno de los contactos que cambian su estado de encendido a apagado o viceversa. Esto significa que la secuencia de los códigos incorrectos demostrados en la ilustración anterior no puede suceder aquí.
2.2 Codificador rotatorio relativo
El codificador rotatorio relativo (también llamado codificador incremental) se utiliza cuando los métodos de codificación absolutos sean demasiado incómodos (debido al tamaño del disco modelado). Este método también utiliza un disco unido al eje, pero este disco es mucho más pequeño marcado con una gran cantidad de líneas de la parte radial como los radios de una rueda. El interruptor óptico, parecido a un fotodiodo, genera un pulso eléctrico que una de las líneas pase a través de su campo visual. Un circuito de control electrónico cuenta los pulsos para determinar el ángulo con el cual el eje da vuelta.
Este sistema, en su forma más simple, no puede medir el ángulo absoluto del eje. Puede medir solamente el cambio en ángulo concerniente a cierto dato arbitrario, tal como posición del eje cuando la energía fue encendida. Esta incertidumbre no es un problema para los dispositivos de entrada de la computadora tales como ratones y TrackBall. Cuando la posición absoluta debe ser sabida, un segundo sensor puede ser agregado que detecta que el eje pasa por su posición cero.
El segundo problema de este sistema es que no puede decir qué dirección está rotando el eje. Para superar este problema, el sensor óptico se debe aumentar a dos sensores colocados en ángulos diversos alrededor del eje. La dirección de rotación se puede deducir en orden en la cual los dos sensores detecten cada línea radial. Este tipo de codificador se conoce como codificador de la cuadratura.
2.3 Codificador rotatorio limitado
Si el fabricante mueve un contacto a una diversa posición angular (en la misma distancia del eje del centro), después el patrón correspondiente al anillo necesita ser rotado el mismo ángulo para dar la misma salida. Si el pedacito más significativo (el anillo interno en el cuadro 1) se rota bastante, empareja exactamente el anillo hacia afuera.
Por muchos años, Torsten Sillke y otros matemáticos creyeron que era imposible codificar la posición respecto a un limitado de modo que las posiciones consecutivas diferencian en solamente un sensor, a excepción del sensor 2, codificador de la cuadratura de la uno-pista. Sin embargo, en 1996, Paterson y Brandestini publicaron un papel que demostraba que era posible, con varios ejemplos.
Uso Industrial
NOTA: esto se basa en la observación del campo.
La variante de la cuadratura es la más frecuente de uso industrial, aun cuando es sofisticado y los transductores absolutos más resistentes han estado en el mercado por un tiempo. La mayoría de los usos están satisfechos con una función auto guiada hacia el blanco inicial en energía hasta que alcanzan la colocación absoluta deseada. El cableado simple está asociado a los codificadores de la cuadratura. Y como tal, ha llegado a ser notablemente más barato que el resto de las operaciones de precisión. El único competidor serio que ha notado es el discernidor de imágenes. Esto será debido al discernidor de imágenes que es capaz de soportar así mismo los ambientes del picadillo como el funcionamiento de líquidos.
Otra tendencia que puede suceder son los transductores modernos que se diseñan al salir la cuadratura mientras señala que no son realmente codificadores de la cuadratura en todos.
Durante los 80 y los 90, el mouse, con el interior rotatorio de dos codificadores de la cuadratura era popular como socio al fenómeno de interfaz gráfica de usuario de levantamiento. Este aparato iba a ser utilizado como estación de trabajo pero fue considerado una aceptación mucho más grande para la computadora.
El codificador rotatorio vio que una declinación rápida en este papel como el ratón óptico llegó más lejos en la escena en el 2000. Como nota lateral, estos "opticales" también producen la cuadratura que señala, aun cuando el mercado masivo de la PC ha utilizado siempre el puerto serial del comando para recolectar los deltas.
Un ejemplo de codificadores tanto rotativos como lineales es la marca TR Electronic, marca alemana pionera en el mundo de los sistemas de posicionamiento, especializada en todo tipo de codificadores sobre todo para uso industrial.
Un ejemplo típico de este tipo de codificadores se puede ver dentro de los mouse (ratones) de computadora: pequeños discos con ranuras en cada eje de movimiento. Un circuito lleva la cuenta de los pulsos, con lo que se puede conocer tanto el ángulo que se ha avanzado como la velocidad de giro (midiendo el tiempo entre pulsos). Estos codificadores son baratos pero no ofrecen una posición absoluta (como el potenciómetro), ya que el disco es igual en toda su circunferencia y no hay manera de saber dónde está ubicado (en qué ángulo absoluto) el eje. Habitualmente, se debe proveer al sistema de una manera de ubicarse en una posición cero, y de ahí en adelante contar pulsos hacia adelante o hacia atrás.
Por razones de precisión óptica, la codificación se suele hacer en una codificación llamada código Gray, que luego se traduce en el código binario estándar que utiliza una computadora para sus cuentas.
3. Sensores auto resonantes
Sensores autorresonantes, de frecuencia variable o casi digitales: Son sensores basados en un fenómeno físico resonante, en general todos requieren de frecuencímetros o contadores.
3.1 Principio de funcionamiento de los sensores autorresonantes.
El principio de funcionamiento de los sensores autorresonantes se basa en un fenómeno físico resonante ofrecen una frecuencia de salida que depende de una magnitud de interés que afecta a la frecuencia de oscilación. Todos requieren un frecuencímetro-contador para medir bien la frecuencia o bien el periodo de oscilación- La elección de uno u otro método depende de la resolución deseada y del tiempo disponible para la medida. Las estructuras resonantes basadas en mono cristales de silicio se prestan bien a la realización de circuitos integrados.En sensores se emplean tanto osciladores armónicos como de relajación. En los primeros hay una energía almacenada que cambia de una u otra forma de almacenamiento, por ejemplo de energía cinética en el movimiento de una masa a energía potencial en la tensión de un muelle. En los segundos hay una única forma de almacenamiento, y la energía almacenada se disipa periódicamente mediante algún mecanismo de puesta a cero.
 Figura 10. Representación Esquemática de Sensores Autorresonates.
Figura 10. Representación Esquemática de Sensores Autorresonates.Es importante observar que si bien la ausencia de convertidor A/D hace innecesaria una tensión de referencia estable para medir la salida de estos sensores, no por ello es posible medir una magnitud absoluta -la frecuencia del oscilador- sin tener otra magnitud de referencia bien conocida, en este caso el oscilador del que se obtiene la base de tiempos del contador con que se mida la frecuencia. Este oscilador de referencia será generalmente de cristal de cuarzo y tendrá derivas con el tiempo y la temperatura. Las derivas temporales se deben a cambios estructurales en el cuarzo debidos a imperfecciones en la estructura cristalina, a las tensiones mecánicas ejercidas por los soportes sobre el cuarzo, que decrecen con el tiempo, y que varían después de ciclos térmicos: y a los cambios de masa del cristal por absorción de contaminantes dentro del encapsulado.
3.2 Tipos de sensores autorresonantes
3.2.1 Sensores Basados en ondas superficiales
Los sensores SAW basan su principio de operación en velocidad de propagación de las ondas Rayleigh en piezoeléctrico debido a la presencia de una cantidad sobre la misma. Los dispositivos SAW son estructuras la modificación de la superficie de un de masa depositada interdigitadas que se realizan sobre substratos piezoeléctricos para que las ondas acústicas superficiales puedan ser generadas mediante una excitación eléctrica. Se pueden utilizar como substratos o medio de soporte el Si y éste no es un material piezoeléctrico, por lo que se requiere una capa adicional piezoeléctrica sobre el silicio para desarrollar los sensores SAW. Para ello pueden utilizarse diferentes materiales piezoeléctricos, tales como, CDs, AIN y en particular el ZnO. Por otra parte el AIN presenta las ventajas de que sus constantes piezoeléctricas tienen muy baja dependencia con la temperatura (como el cuarzo) y una velocidad de propagación de las ondas acústicas de hasta tres veces superior al cuarzo por lo que se incrementaría la sensibilidad de estos dispositivos.
Son sensores que operan en frecuencias altas, barren el rango entre 100 y 500 MHz y aunque pueden llegar, incluso, hasta pocos GHz tales frecuencias requieren un sofisticado diseño del circuito oscilador. Los transductores interdigitados (IDT) son los que se usan para excitar y detectar una onda acústica superficial sobre un substrato piezoeléctrico.
 Figura 11. Sensores Basados en ondas superficiales (SAW).
Figura 11. Sensores Basados en ondas superficiales (SAW).
3.2.2 Galgas Acústicas
Una galga acústica es un dispositivo capaz de resonar a frecuencia de la banda audible (de ahí su nombre), funciona con un hilo de reluctancia variable y se utiliza comúnmente para medir deformaciones, por lo que mide variables como son la fuerza, masa y la longitud. También utiliza el principio del módulo de Young para hacer estas mediciones.
3.2.3 Cilindros Vibrantes Es un cilindro metálico con paredes delgadas (75 um) y un extremo ciego, la frecuencia de oscilación dependerá de las dimensiones y material del cilindro, y de cualquier masa que vibre con sus paredes Utilizando, igual que antes, un excitador electromagnético para mantener la oscilación, se puede medir la diferencia de presión entre las dos caras del cilindro, porque la diferencia de presiones entre ambos lados de las paredes produce una tensión mecánica en éstas Se puede medir la densidad de un gas porque el gas cerca de las paredes vibra al hacerlo éstas. Para líquidos corrosivos es mejor emplear un cilindro de vidrio o cerámico y el excitador piezoeléctrico, ya que los electromagnéticos no sirven. La aplicación más extendida de este método es, sin embargo, la medida continua de la densidad de líquidos, con una disposición como la indicada en la figura x Consiste en dos conductores en paralelo, como por los que fluye el liquido, sujetos por cada extremo a una base fija y acoplados al conducto principal, con una junta flexible en cada extremo.

Figura 12. Cilindros Vibrantes.
Como el volumen es conocido y la frecuencia de oscilación de los dos conductos, que se comportan como un diapasón, depende de la masa, en consecuencia de la densidad. La relación es de la forma :

Siendo fo la frecuencia de oscilación de la tubería sin líquido YPc una constante que depende de la geometría del sistema. La frecuencia de salida se puede medir, por ejemplo, con un PLL cuyo VCO excita el tubo vibratorio. El filtro de paso bajo que hay entre el comparador de fase y el oscilador, filtra entonces el ruido de alta frecuencia captado por los hilos de conexión.
3.2.4 Sensores Resonadores de Cuarzo Estos sensores están basados en una frecuencia de oscilación alta, se basan en la variación que sufre ésta ante una deformación del cristal, para un elemento con electrodos metálicos depositados en dos de sus caras, en la figura 13 se muestra el circuito eléctrico equivalente de un sensor de cuarzo resonante. En ésta, Lm viene determinada por la masa del cristal, Cm por la elasticidad mecánica, Rm por la fricción interna (que se traduce en una disipación de calor) y Co es la capacidad del soporte del cristal en paralelo con la de los electrodos metálicos, con el material piezoeléctrico como dieléctrico. La presencia de un circuito resonante permite emplear dicho elemento como base de un oscilador.

Figura 13. Circuito equivalente de material piezoeléctrico
Dado que el cuarzo es inerte, si se emplea un mono cristal de gran pureza la estabilidad de la resonancia mecánica a largo plazo es muy alta. La estabilidad a corto plazo depende del factor de calidad Q (alta rigidez, poca histéresis) y la inductancia equivalente, que son muy elevados. Una estabilidad a corto piazo elevada permite diseñar sensores de alta resolución, mientras que una gran estabilidad a largo plazo significa que se necesitarán menos re calibraciones.
Existen diversos tipos de sensores resonantes clasificándose según la variable física a medir.
*Termómetros Digitales de Cuarzo
*Micro balanzas de cuarzo
*Sensores de gas resonante
*Sensores de fuerza y presión basados en resonadores de cuarzo.
3.3 Micro balanzas de cuarzo
Las microbalanzas de cristal de cuarzo QCM (siglas de Quartz Cristal Microbalance). Es básicamente un sensor muy sensible, que mide pequeños cambios de masa en una sustancia. Su fundamento es un cristal piezoeléctrico que oscila a su frecuencia de resonancia, y, debido a los cambios en dicha frecuencia de resonancia cuando se deposita una pequeña cantidad de sustancia, se obtiene la cantidad de masa depositada. La correlación entre la masa y la frecuencia se obtiene por medio de la ecuación de Sauerbrey.
3.3.1 Principio de funcionamiento de sensores de cuarzo
En 1880 Jacques y Pierre Curie descubrieron que al aplicar una tensión mecánica sobre la superficie de diferentes cristales, entre ellos el cuarzo, se origina un potencial eléctrico a través del cristal, cuya magnitud es proporcional a la tensión aplicada. Este comportamiento se conoce como el efecto piezoeléctrico, aquellos que cristalizan en grupos espaciales que no tienen un centro de simetría. Un cristal de un material acéntrico posee un eje polar debido a los dipolos asociados a la disposición de los átomos en la red cristalina. La tensión aplicada provoca un desplazamiento de los átomos del cristal y por tanto de los dipolos, generándose una carga eléctrica. El efecto es reversible, es decir, al aplicar una diferencia de potencial a un cristal piezoeléctrico se producen en él tensiones mecánicas que dan lugar al desplazamiento de partículas y a la aparición de ondas acústicas. Este efecto es el principio teórico del funcionamiento de la microbalanza electroquímica de cristal de cuarzo (QCM).
 Figura14. Microbalanza de Cuarzo QCM.
Figura14. Microbalanza de Cuarzo QCM.Un sensor tipo QCM consiste en un disco delgado de cuarzo entre dos electrodos. Dadas las propiedades piezoeléctricas y orientación cristalográfica del cuarzo, mediante la aplicación de un voltaje entre los electrodos se produce una deformación del cristal. El cristal puede ser excitado hasta la resonancia cuando la frecuencia sea tal que el grosor del cristal es un número entero N de veces media longitud de onda. La frecuencia de resonancia del cristal depende de la masa total resonante, cuando se deposita una capa delgada y rígida. La variación de la frecuencia es proporcional a la cantidad de masa añadida y el sensor tipo QCM opera como una balanza sensible. Si la frecuencia de oscilación era fo, el área del cristal A, su densidad p. y la masa depositada Am. El desplazamiento de frecuencia viene dado en primera aproximación por la ecuación de Sauerbrey,
Normalmente, los QCM tienen incorporados un circuito oscilador donde la frecuencia de oscilación va disminuyendo conforme se va acumulando masa sobre la superficie del diseño. Estas microbalanzas tienen la capacidad de dar soluciones a un cierto número de medidas como monitorización del depósito del material sensible, detección de especies, degradación de mezclas complejas, detección cromatográfica de líquidos, y análisis electroquímicos. También ha sido demostrado como los QCM pueden operar en contacto con líquidos.
3.3.2 Circuito Equivalente
 Figura 15. Circuito Equivalente de una Sensor QMC.
Figura 15. Circuito Equivalente de una Sensor QMC.
La curva de impedancia obtenida se ajusta al circuito y los parámetros que se obtienen se usan para calcular valores tales como la frecuencia de resonancia, el factor de calidad Q y la disipación D.
3.3.3 Construcción de microbalanzas de cuarzo
Los sensores QCM (Microbalanza de Cuarzos) son construidos con una fina lámina de cristal de cuarzo situado entre dos electrodos, donde la frecuencia de oscilación del sensor viene dada por el grueso de la lámina de cuarzo y el corte del cristal original para obtener la lamina.
Figura 16. Sensores QCM.
El corte utilizados en la microbalanza de cuarzo son paralelos a los planos XZ o YZ, que se conocen, respectivamente, como cortes X o Y. El corte "AT" (35º de inclinación con respecto al plano XZ (Figura 17) es el más utilizado y se fabrica hasta frecuencias relativamente altas, mostrando una excelente estabilidad de frecuencia frente a las variaciones de la temperatura. Una lámina de este tipo, en su modo fundamental de oscilación, se contrae y expande a lo largo de un eje normal a las caras principales por efecto de un campo eléctrico  perpendicular a dicho eje, el plano principal permanece en reposo y las dos caras tienen la máxima amplitud de movimiento.
perpendicular a dicho eje, el plano principal permanece en reposo y las dos caras tienen la máxima amplitud de movimiento.
Figura 17. Corte de Cristal de Cuarzo.
En la siguiente figura (18) se muestra un esquema de la construcción interna de un cristal de cuarzo, aunque su grueso se ha exagerado. Para un cristal cuya frecuencia sea de por ejemplo, 15 MHz el grueso de la lámina de cuarzo estará alrededor 0,15 milímetros. Figura 18. Esquema de construcción interna Cristal de Cuarzo.
Figura 18. Esquema de construcción interna Cristal de Cuarzo.
El cristal de cuarzo es un material frágil y por tanto es preciso protegerlo con una capsula que suele ir rellena de un gas inerte, por ejemplo, nitrógeno.
El circuito eléctrico es el responsable de generar un campo eléctrico oscilante entre las dos placas, lo cual provoca el comportamiento piezoeléctrico de la lámina de cuarzo; cuya frecuencia de resonancia varía según el tipo de corte y el espesor de la lámina, en la siguiente figura se muestra la lámina de cuarzo incluido el circuito eléctrico.
 Figura 19. Lamina de Cuarzo con circuito eléctrico.
Figura 19. Lamina de Cuarzo con circuito eléctrico.3.3.4 Sistema de acondicionamiento
Los sensores QCM (Microbalanza de Cuarzo) poseen una alta impedancia, una forma de medir la señal proveniente de este sensor es empleando un amplificador de carga y la otra es mediante el uso de un amplificador electrométrico. Además estos sensores necesitan un circuito oscilador un circuito básico de los osciladores son los serie y los paralelos.
Un circuito básico oscilador resonante serie, utiliza un cristal que está diseñado para oscilar en su frecuencia resonante serie natural. En éste circuito no hay capacitores en la realimentación Los circuitos resonantes serie son usados por la baja cantidad de componentes que se utilizan, pero estos circuitos pueden tener componentes parásitos que intervienen en la realimentación. y en el caso que el cristal deje de funcionar oscilarán a una frecuencia impredecible.
Un circuito oscilador paralelo utiliza un cristal que está diseñado para operar con un valor específico de capacidad de carga. Esto resultará en un cristal que tendrá una frecuencia mayor que la frecuencia resonante serie, pero menor que la verdadera frecuencia resonante paralelo. Un circuito básico se muestra a continuación.

Figura 20. Circuitos básicos
Otro circuito acondicionador más complejo utilizando parta e oscilador transistor Schottky como se muestra en la siguiente figura:

Figura 21. Circuito acondicionador más complejo
3.3.5 Aplicación de microbalanza de cuarzo
Las microbalanzas de cristal de cuarzo QCM es un sensor muy sensible a los cambios de masa. Además monitoriza, en tiempo real, los cambios de masa con una gran sensibilidad. Ello permite que las aplicaciones a las que se puede dedicar abarcan un espectro muy amplio de campos. Desde Biotecnología (detección de virus, membranas biológicas, interacción de ADN y ARN, absorción de proteínas, reacciones inmunológicas), formación de monocapas (Langmuir-Blodgett, bicapas), investigación con surfactantes (efectividad e interacciones) y muchos otros.
3.3.5.1-Biomateriales
Cabe destacar:
-Absorción de proteínas
-Reacciones inmunológica
-Adhesión de células
-Biocompatibilidad de superficies
3.3.5.2- Superficies funcionales
Por ejemplo:
-Creación de superficies selectivas.
-Membranas de Lípidos.
-Superficies poliméricas.
-Superficies reactivas.
3.3.5.3- Formación de capas delgadas
-Películas L y LB.
-Monocapas self-assembled.
-Absorción polielectrolítica.
-Superficies reactivas.
-Recubrimientos.
-Formación de bicapas.
-Monocapas absorbidas.
3.3.5.4- Surfactantes
Cabe destacar:
-Efectividad de surfactantes.
-Interacción surfactante-superficie.
3.4 Caudalimetro de Vórtice
El principio del caudalimetro de vértice esta basado en la medición de la frecuencia de generación de vórtices por un obstáculo insertado en el flujo, cuya frecuencia es proporcional a la velocidad media, en un campo dado de número de Reynolds.Aunque existan muchos dispositivos de este tipo, experiencia con este método de medida de caudal es limitada y este método solamente se puede utilizar con precaución.
Por ejemplo, cualquier vibración de la conducción es capaz de alterar la frecuencia medida y por lo tanto debe ser evitada.
3.5.- Otras Investigaciones Químicas
Cabe destacar:
-Disoluciones de polímeros
-Interacciones moleculares con drogas
4. Problema practico industrial
4.1 Análisis de Compuesto del Agua
Una matriz de las microbalanzas cristalinas del cuarzo (QCMs) se ha desarrollado para medir y para identificar cantidades de rastro de compuestos orgánicos volátiles (VOCs) en agua. En un sistema de experimentos, un total de nueve QCMs polímero-revestido fue probado con concentraciones que variaban de doce VOCs mientras que la frecuencia y el voltaje el humedecer fueron medidos. QCMs es rugoso, de baja potencia, miniaturizado fácilmente, y capaz del producto químico directo que detecta en líquidos.
Por otra parte, QCMs se puede adaptar para muchas diversas aplicaciones desarrollando las capas que responden a diversas moléculas de la blanco, agregando a su flexibilidad.
4.2 Usos
La capacidad de proporcionar la supervisión en tiempo real de contaminantes químicos en muestras de agua se puede utilizar para una variedad de usos: en línea la supervisión de contaminantes en proceso, recicla, y el agua inútil supervisión de la calidad de la agua subterránea detección de contaminantes en corrientes, los lagos y los abastecimientos de agua supervisión de descargar en canales costa afuera.
Los compuestos estudiaron con la matriz QCM para evaluar la utilidad de los sensores de QCM para detectar una gama de los contaminantes de VOC, los compuestos siguientes fueron probados:
-VOCs polar - acetona, isopropanol, glicol de etileno, y acetato ethyl.
-VOCs no polar - p-xileno, tolueno, cyclohexane, y n-pentane.
-Hidrocarburos tratados con cloro - carbontetrachloride, cloroformo, tricloroetileno (TCE) y tetrachloroethylene (PCE).
5. Otros métodos de detección.
5.1. Basado en uniones semiconductoras. Construcción y circuitos de acondicionamiento




5.2. Basados en ultrasonidos. Construcción y circuito de acondicionamiento
El ultrasonido se define como ondas de sonido de alta frecuencia que están por encima del rango de percepción humana. El punto más bajo es generalmente 20kHz y el superior ya está en el rango del megahertz. Los seres humanos son capaces de detectar sonidos en el rango de 20Hz a 20kHz. Los instrumentos portátiles que miden la intensidad del ultrasonido transportado en el aire o por medio de una estructura cubren frecuencias desde 20 kHz hasta 100 kHz.
El método generalizado para detectar fugas es sencillo. Un inspector con un instrumento de ultrasonido escanea un área y busca un sonido diferente que se acelera. Con ajustes continuos del control de volumen se sigue el sonido de la fuga hasta que se escucha el punto más alto. En el rango ultrasónico, el inspector es capaz de discriminar entre ruidos de fondo irrelevantes y la señal de la fuga. Algunos instrumentos incluyen una sonda focalizadora de hule que estrecha el área de recepción. Estas sondas protegen contra ultrasonidos competitivos y ayudan a localizar la ubicación de fugas pequeñas. La gran ventaja de la detección por ultrasonido es que puede usarse en diferentes ambientes, pues es sensible al sonido y no específica para cada gas. Cuando ocurre una fuga, el fluido (líquido o gas) se mueve desde el lado de alta presión a través del agujero al lado de baja presión de la fuga, donde se expande rápidamente y produce un flujo turbulento.
Esta turbulencia tiene fuertes componentes ultrasónicos que son detectados por el instrumento. La intensidad de la señal de ultrasonido cae rápidamente desde la fuente, lo cual permite localizar exactamente el sitio de la fuga.
Para sistemas fuera de servicio, una prueba especializada, denominada una prueba de tono, emplea un transmisor ultrasónico para producir una fuente de sonidos ultrasónicos. La prueba se lleva a cabo colocando un transmisor adentro, o en un lado de la pieza del equipo a inspeccionar. Una señal vibratoria viaja por toda la pieza y penetra cualquier sitio de fuga existente. Un escaneado para penetración sónica usa un instrumento de ultrasonido y localiza la fuga. Esta prueba es especialmente apta para intercambiadores de calor.
5.3 Basado en fibras ópticas. Construcción y circuito de acondicionamiento.
Los sensores de Fibra Óptica están formados por un amplificador que contiene el del emisor y el receptor, y un cable de fibra óptica que transmite y recibe la luz reflejada por el objeto a detectar.
Las características y presentaciones dependen mucho del fabricante. Así como en las Fotocélulas, la evolución tecnológica no se ha hecho muy patente, en los sensores de Fibra Óptica se ha notado una evolución en los últimos años muy importante.
Un filamento de vidrio sumamente delgado y flexible (de 2 a 125 micrones) capaz de conducir rayo ópticos (señales en base a la transmisión de luz). Las fibras ópticas poseen capacidades de transmisión enormes, del orden de miles de millones de bits por segundo. Se utilizan varias clases de vidrios y plásticos para su construcción.
Una fibra es un conductor óptico de forma cilíndrica que consta del núcleo (core), un recubrimiento (clading) que tienen propiedades ópticas diferentes de las del núcleo y la cubierta exterior (jacket) que absorbe los rayos ópticos y sirve para proteger al conductor del medio ambiente así como darle resistencia mecánica. Además, y a diferencia de los pulsos electrónicos, los impulsos luminosos no son afectados por interferencias causadas por la radiación aleatoria del ambiente.
Cuando las compañías telefónicas reemplacen finalmente los cables de cobre de sus estaciones centrales e instalaciones domiciliarias con fibras ópticas, estarán disponibles de modo interactivo una amplia variedad de servicios de información para el consumidor, incluyendo la T.V. de alta definición.Cada una de las fibras ópticas, puede transportar miles de conversaciones simultáneas de voz digitalizada.
Los sensores de Fibra Óptica están formados por un amplificador que contiene el del emisor y el receptor, y un cable de fibra óptica que transmite y recibe la luz reflejada por el objeto a detectar.
Las características y presentaciones dependen mucho del fabricante. Así como en las Fotocélulas, la evolución tecnológica no se ha hecho muy patente, en los sensores de Fibra Óptica se ha notado una evolución en los últimos años muy importante.
5.3.1 Ventajas De La Fibra Óptica
Capacidad de transmisión: La idea de que la velocidad de transmisión depende principalmente del medio utilizado, se conservo hasta el advenimiento de las fibras ópticas, ya que ellas pueden transmitir a velocidades mucho más altas de lo que los emisores y transmisores actuales lo permiten, por lo tanto, son estos dos elementos los que limitan la velocidad de transmisión.
Mayor capacidad debido al ancho de banda mayor disponible en frecuencias ópticas.
Inmunidad a transmisiones cruzadas entre cables, causadas por inducción magnética.
Inmunidad a interferencia estática debida a las fuentes de ruido.
Resistencia a extremos ambientales. Son menos afectadas por líquidos corrosivos, gases y variaciones de temperatura.
La seguridad en cuanto a instalación y mantenimiento. Las fibras de vidrio y los plásticos no son conductores de electricidad, se pueden usar cerca de líquidos y gases volátiles.
5.3.2 Parámetros De Una Fibra Óptica
Existen varios parámetros que caracterizan a una fibra óptica. Se habla de parámetros estructurales y de transmisión establecen las condiciones en las que se pueden realizar la transmisión de información.Entre los parámetros estructurales se encuentra:
*El perfil de índice de refracción.
*El diámetro del núcleo.
*La apertura numérica.
*Longitud de onda de corte.
En cuanto a los parámetros de transmisión se tiene:
*Atenuación.
*Ancho de banda.

Figura 22. fibroscopio
Bibliografía:
http://www.virtual.unal.edu.co/cursos/sedes/manizales/4040003/lecciones/cap5lecc10.htm
http://es.wikipedia.org/wiki/Codificador_rotatorio
http://sensorautorresonantes.blogspot.com/
http://medicionesindustriales2007i.blogspot.com/2007_07_01_archive.html
http://www.investigacion.frc.utn.edu.ar/sensores/Tutorial/TECNO5.pdf
http://www.investigacion.frc.utn.edu.ar/sensores/Tutorial/INDICE.pdf
http://www.dei.uc.edu.py/tai2002/SENSORES/clasif.htm
http://www.etsetb.upc.es/documents/guia_docent/assignatures/cast/MasterEE/11617.pdf




 Las características completas en cuanto a tensión de salida se encuentran tabuladas de forma que se dan las tensiones correspondientes a distintas temperaturas y cuando la unión de referencia esta a 0,00°C. Esto no significa que la unión a 0,00°C de siempre una tensión de 0v para cualquier termopar. En el siguiente cuadro se muestra un fragmento de una tabla donde las tensiones o temperaturas intermedias se obtienen mediante interpolación lineal.
Las características completas en cuanto a tensión de salida se encuentran tabuladas de forma que se dan las tensiones correspondientes a distintas temperaturas y cuando la unión de referencia esta a 0,00°C. Esto no significa que la unión a 0,00°C de siempre una tensión de 0v para cualquier termopar. En el siguiente cuadro se muestra un fragmento de una tabla donde las tensiones o temperaturas intermedias se obtienen mediante interpolación lineal.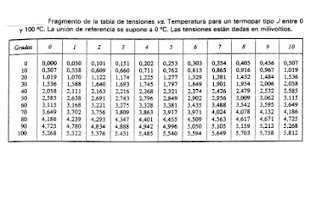









 5.5 SENSORES PIEZOELÉCTRICOS
5.5 SENSORES PIEZOELÉCTRICOS



{kind=link}
{kind=link}
{kind=link}