TEMA II: SENSORES MODULADORES
Sumario:
1. Sensores resistivos.
1.1. Potenciómetros (Variables mecánicas)
1.2. Galgas extensométricas (Variables mecánicas)
1.3. Termorresistencias (Variable térmicas)
1.4. Termistores (Variables térmicas)
1.5. Magnetorresistencias (Variable magnéticas)
1.6. Fotorresistencias (Variables ópticas)
1.7. Higrómetros resistivos (Variables químicas)
1.8. Acondicionamiento: Puente de Wheatstone, Amplificador de Instrumentación.
2. Sensores de reactancia variable
2.1. Sensores Capacitivos
2.1.1. Condensador variable
2.1.2. Condensador diferencial
2.1.3. Acondicionamiento: divisor de tensión, amplificador de carga, amplificador de transconductancia
2.2. Sensores inductivos
2.2.1. Reluctancia variable
2.2.2. Inductancia mutua (LVDT)
2.2.3. Acondicionamiento
3. Sensores electromagnéticos
3.1. Basados en la ley de Faraday
3.2. Basados en el efecto Hall
Sensores Moduladores
Los sensores moduladores son aquellos que varían un parámetro eléctrico en función de la variable a medir. La variable puede ser presión, temperatura, caudal, etc., y el parámetro eléctrico
puede ser resistencia, inductancia, capacitancia o campo magnético o eléctrico. La clasificación general de esto sensores se hace en Sensores resistivos y sensores de reactancia variable.
1. Sensores resistivos.
Los sensores moduladores del tipo resistivos, son aquellos que varían una resistencia en función de la variable a medir. Se ha realizado una clasificación de estos sensores en función de la variable a medir, tal como refleja la tabla siguiente:

1.1. Potenciómetros (Variables mecánicas)
El potenciómetro es un sensor utilizado para medir la variable mecánica desplazamiento, y consiste de un dispositivo con dos partes y tres terminales.
Una de las partes es una resistencia fija descubierta la cual puede ser de carbón o de hilo arrollado.
La otra parte es un contacto móvil que se desplaza por la resistencia fija.
En Teoría, para un conductor cualquiera, su resistencia viene dada por:

El potenciómetro es un sensor utilizado para medir la variable mecánica desplazamiento, y consiste de un dispositivo con dos partes y tres terminales.
Una de las partes es una resistencia fija descubierta la cual puede ser de carbón o de hilo arrollado.
La otra parte es un contacto móvil que se desplaza por la resistencia fija.
En Teoría, para un conductor cualquiera, su resistencia viene dada por:

Donde:
ρ = Resistividad del material (Ωm)
A = Sección transversal
l = Longitud del conductor.
En la figura siguiente se muestra el modelo de un potenciómetro. Si se denomina x a la distancia recorrida por el curso, la resistencia obtenida será:
El problema de este tipo de sensor es:
a. Varía con la temperatura.
b. Varía con la deformación de la sección transversal, causada por la presión o fuerzas ejercidas sobre el.
c. El contacto del cursor origina desgaste, modificando la sección transversal.
Pueden ser lineales, como la figura mostrada anteriormente, o no lineales como el siguiente:
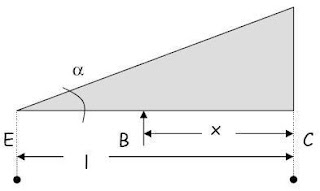 En este último caso, la resistencia fija entre E y C está formada por una sección triangular variable de hilo arrollado. Este hilo tiene una sección A y diámetro D.
En este último caso, la resistencia fija entre E y C está formada por una sección triangular variable de hilo arrollado. Este hilo tiene una sección A y diámetro D.
La ecuación de su resistencia es ahora:
Los potenciómetros pueden dar una salida analógica, si la resistencia fija es de carbón, o digital, si la resistencia fija está formada por hilo arrollado.
El potenciómetro se utiliza para medir preferiblemente desplazamientos, conectando el objeto de medición a su cursor. Sin embargo, puede ser utilizado para medir otras variables de forma indirecta, cuando estas generen desplazamientos en otros dispositivos.
Por ejemplo:
a. Se puede utilizar para medir presión, si se conecta el cursor al extremo de un tubo Bourdon.
b. Para medir nivel en líquidos conductores o no conductores.
c. Para medir temperatura si se conecta al extremo de un medidor de bulbo y capilar.
En los casos a y c se utiliza para generar una señal eléctrica. Mientras que en el caso b es el elemento primario.
1.2. Galgas extenso métricas (Variables mecánicas)
Se basan en el efecto piezorresistivo ya descrito para el potenciómetro. LA diferencia es que ahora se busca modificar la resistencia variando algunos de los parámetro de la resistencia, por ejemplo, su longitud l o su sección transversal A.
Si a una pieza de material resistivo se le aplica un esfuerzo, esta se deformará, y cambiará su resistencia. Por tanto, este tipo de sensores se utiliza para medir fuerza o presión, aunque también puede aplicarse a la medida de desplazamientos pequeños.
Todo material al que se le aplica un esfuerzo se deformará en mayor o menor grado, y llegará a un punto en que se romperá. Esta relación esfuerzo vs deformación se muestra en la siguiente gráfica.
Si se tiene un conductor cilíndrico de longitud l y sección transversal A, y se le aplica un esfuerzo perpendicular a la sección transversal, de tal forma de comprimirlo o estirarlo, es decir,
Donde:
E = Constante del material o módulo de Young en Pa
σ = Tensión mecánica o esfuerzo en Pa o Kg/cm2
ε = Deformación unitaria adimensional, normalmente dada en μdeformaciones (10-6 m/m)
Este análisis tan simple no es aplicable para piezas tridimensionales, ya que al aplicar el esfuerzo en la dirección indicada es de esperar que también se altere la sección transversal A. Si denominamos D al diámetro involucrado, se debe definir un nuevo coeficiente: el coeficiente de Poisson, el cual viene definido como:
Se procederá a realizar un análisis de la relación de estas deformaciones con la resistividad del material.
Para los metales se cumple:
Donde C es la constante de Bridgman (1,13 a 1,15 para galgas)
El volumen del resistor cilíndrico indicado al principio es:
Sustituyendo (8) en (7)
Sustituyendo (9) en (6)
De (1)
Sustituyendo (11) en (10)
Como es un cilindro:
Sustituyendo (14) en (12)
K se denomina factor de sensibilidad de la galga.
Si los cambios en un sensor resistivo puede ser expresados como
Finalmente como de (4)
Los principales problemas de las galgas son:
a. Cuidar el margen elástico.
b. El esfuerzo debe ser totalmente transversal a la galga.
c. La temperatura altera su valor.
Ejemplos de galgas:
Las galgas se pueden aplicar a:
a. Medida de fuerza.
b. Medida de presión.
c. Medida de desplazamientos pequeños.
d. Medida de vibración.
1.3. Termorresistencias (Variable térmicas)
Una termorresistencia es un dispositivo que varía su resistencia con la temperatura. Suele denominarse RTD (Resistive temperature detector) por sus siglas en ingles.
El símbolo que la caracteriza es:
El símbolo sin flecha indica que la variación es intrínseca por la característica resistiva, no por manipulación manual.
La ecuación característica de las termorresistencia es la siguiente:
Este dispositivo tiene como limitaciones.
* No puede medir temperaturas próximas a la de la fusión del conductor con que se fabrica.
* El autocalentamiento ocasionará derivas en la medición.
* S se deforma, puede cambiar su patrón de medición.
Tiene como ventaja el ser diez veces más sensible que los termopares, tal como se verá más adelante.
Normalmente no es necesario considerar todos los coeficientes de la ecuación (19), sino que considerando solo el primer término se tiene una excelente aproximación, es decir,
Donde α es la sensibilidad del material, y R0 es la resistencia a la temperatura de referencia (normalmente 0 grados).
En la tabla siguiente se muestran las Termorresistencias típicas:
La termorresistencia mas común por su linealidad es la de platino, que se suele denominar.
Pt100 (termorresistencia de platino con R0 =100 Ω a 0° C)
Pt1000 (termorresistencia de platino con R0 =1000 Ω a 0° C)
1.4. Termistores (Variables térmicas)
Los termistores también son resistencias que varían su magnitud con la temperatura. Se diferencian de las termorresistencia por que están basadas en semiconductores. Por tanto su característica no es lineal, aunque dentro de un margen adecuado pueda ser considerada de es amanera.
Su símbolo será:
La raya quebrada indica que no es lineal. El elemento positivo o negativo indica que tiene una característica positiva o negativa respectivamente. Es decir, si es de coeficiente positivo, PTC, la resistencia se incrementa con la temperatura. Si es de coeficiente negativo, NTC, disminuye con la temperatura.
En el caso de una NTC la ecuación característica será
Donde:
B = temperatura característica del material (2000 K a 5000 K)
R0 = Resistencia a la temperatura de referencia T0, normalmente la temperatura ambiente
(25 °C o 298 K)
Tiene como ventajas el ser más sensible que las Termorresistencias, más rápidas y permite hilos de conexión mayores.
Tiene como desventaja el ser no lineal, y al variar su temperatura por el autocalentamiento del material.
Los termistores tienen muchas aplicaciones algunos de los cuales son.
a. Medida directa de temperatura por variación de corriente:
b. Medida de caudal en circuito puente.
c. Protección por autocalentamiento.
1.5. Magnetorresistencias (Variable magnéticas)
Las magnetorresistencias se basan en la variación de resistencia en un conductor por variaciones en el campo magnético. Este efecto se denomina efecto magnetorresistivo y fue descubierto por Lord Kelvin en 1856
Este tipo de sensores tiene la ventaja con respecto a los sensores inductivos, por ser de orden cero, y con respecto a los sensores de efecto Hall por ser más sensible y proveer un mayor margen de medición de medición.
Está formada por una aleación de Hierro y Níquel (permalloy)
Tiene las siguientes aplicaciones:
* Medición de campos magnéticos en las lectoras de tarjetas.
* Otras magnitudes que provean un cambio en el campo magnético, como el desplazamiento de una pieza, detectores de proximidad, nivel de flotador, etc. En estos casos se utiliza un imán que cambia su posición con el proceso. El campo generado por el imán es medido por la magnetorresistencia.
1.6. Fotorresistencias (Variables ópticas)
Las fotorresistencias o LDR, es un dispositivo que cambia su resistencia por el nivel de incidencia de luz. Esta formada por materiales semiconductores.
Su símbolo:
1.7. Higrómetros resistivos (Variables químicas)
El higrómetro se utiliza para medir humedad. Se basan en la variación de resistencia que experimentan los materiales por la humedad, como el vapor de agua en un gas o el agua absorbida en un líquido o sólido.
Un material típico es el aislante eléctrico, el cual disminuye su resistencia al aumentar su contenido de humedad.
1.8. Acondicionamiento de sensores resistivos
Los sensores resistivos deben ser conectados a circuitos de interfaz adecuado para poder aprovechar o medir el parámetro variado.
Tradicionalmente no se suele medir la resistencia que varía, sino la variación de otro parámetro que depende de esta, como la tensión, la corriente o la frecuencia.
En este capítulo nos centraremos en los circuitos de interfaz tradicionales, dejando la salida casi-digital o digital a capítulos posteriores.
Los métodos de acondicionamiento se clasificarán en tres grupos:
a. Divisor de tensión.
b. Puente de Weatstone
c. Amplificadores para puente de sensores.
Si en forma general se representa la variación de resistencia en un sensor resistivo como;
El margen de variación de estos medidores puede representar se como:
Todos estos sensores necesitan una alimentación eléctrica y presentan el problema que el autocalentamiento influye en la medida.
1.8.1 Divisor de Tensión:
Un divisor de tensión es una interfaz formada por una combinación serie de un resistor y un sensor, alimentados por una fuente de fija de tensión o corriente. Puede darse el caso que el sensor forme conforme la asociación serie de estos dos dispositivos.
En la siguiente figura se puede observar la aplicación de esta interfaz al caso de potenciómetros.
La ecuación del circuito será:
Si K = Rm/Rn y α = 1-x, entonces
Esta ecuación demuestra que el sistema será lineal solo si K tiende a ∞, lo cual ocurrirá si Rm >> Rn
Antes de continuar se debe destacar que la no linealidad en si debe representar un error.
Por ejemplo, un sensor no lineal dará una respuesta no lineal que no debe ser interpretada como un error de medida. En cambio, si un sensor lineal modifica su característica de salida por culpa de la interfaz, entonces si se puede hablar de error. El caso actual es un ejemplo de este tipo de errores.
Para calcular este error, tomemos en cuenta que:
Valor ideal = Rm tiende a ∞, por tanto, K tiende a ∞, por lo que Vi = V(1-x)
Valor real o medido = Vm de la ecuación (24),
El error será:
El error será máximo cuando
El error absoluto a fondo escala será:
Puede observarse que el problema de esta interfaz se centra en el efecto de carga que introduce el medidor (Rm). Una forma de corregirlo es usando medidores con Rm muy grande.
Otra forma es usando una Rm adicional tal y como muestra la siguiente figura
¿Cuanto vale Vm, y el error de media?
Revisar según el libro
En el caso de que se quiera aplicar esta interfaz a termistores, será necesario utilizar un resistor en serie con el termistor, y medir la caída de tensión en este resistor, a fin de compensar en parte la no linealidad del sensor.
1.8.2. Puente de Wheatstone:
El puente de Wheatstone es un dispositivo orientado a corregir parte del problema que presenta la configuración anterior: Linealidad y sensibilidad.
Donde,
Si en el equilibrio se considera
Entonces,
Se ha obtenido una relación no lineal, lo cual será proporcional solo cuando x << r4 =" R5" r6 =" R7" 0 =" 8.85" r =" ε" m =" NI," l =" recorrido" a =" Área">
ρ = Resistividad del material (Ωm)
A = Sección transversal
l = Longitud del conductor.
En la figura siguiente se muestra el modelo de un potenciómetro. Si se denomina x a la distancia recorrida por el curso, la resistencia obtenida será:
El problema de este tipo de sensor es:
a. Varía con la temperatura.
b. Varía con la deformación de la sección transversal, causada por la presión o fuerzas ejercidas sobre el.
c. El contacto del cursor origina desgaste, modificando la sección transversal.
Pueden ser lineales, como la figura mostrada anteriormente, o no lineales como el siguiente:
En este último caso, la resistencia fija entre E y C está formada por una sección triangular variable de hilo arrollado. Este hilo tiene una sección A y diámetro D.La ecuación de su resistencia es ahora:
Los potenciómetros pueden dar una salida analógica, si la resistencia fija es de carbón, o digital, si la resistencia fija está formada por hilo arrollado.
El potenciómetro se utiliza para medir preferiblemente desplazamientos, conectando el objeto de medición a su cursor. Sin embargo, puede ser utilizado para medir otras variables de forma indirecta, cuando estas generen desplazamientos en otros dispositivos.
Por ejemplo:
a. Se puede utilizar para medir presión, si se conecta el cursor al extremo de un tubo Bourdon.
b. Para medir nivel en líquidos conductores o no conductores.
c. Para medir temperatura si se conecta al extremo de un medidor de bulbo y capilar.
En los casos a y c se utiliza para generar una señal eléctrica. Mientras que en el caso b es el elemento primario.
1.2. Galgas extenso métricas (Variables mecánicas)
Se basan en el efecto piezorresistivo ya descrito para el potenciómetro. LA diferencia es que ahora se busca modificar la resistencia variando algunos de los parámetro de la resistencia, por ejemplo, su longitud l o su sección transversal A.
Si a una pieza de material resistivo se le aplica un esfuerzo, esta se deformará, y cambiará su resistencia. Por tanto, este tipo de sensores se utiliza para medir fuerza o presión, aunque también puede aplicarse a la medida de desplazamientos pequeños.
Todo material al que se le aplica un esfuerzo se deformará en mayor o menor grado, y llegará a un punto en que se romperá. Esta relación esfuerzo vs deformación se muestra en la siguiente gráfica.
Si se tiene un conductor cilíndrico de longitud l y sección transversal A, y se le aplica un esfuerzo perpendicular a la sección transversal, de tal forma de comprimirlo o estirarlo, es decir,
Donde:
E = Constante del material o módulo de Young en Pa
σ = Tensión mecánica o esfuerzo en Pa o Kg/cm2
ε = Deformación unitaria adimensional, normalmente dada en μdeformaciones (10-6 m/m)
Este análisis tan simple no es aplicable para piezas tridimensionales, ya que al aplicar el esfuerzo en la dirección indicada es de esperar que también se altere la sección transversal A. Si denominamos D al diámetro involucrado, se debe definir un nuevo coeficiente: el coeficiente de Poisson, el cual viene definido como:
Se procederá a realizar un análisis de la relación de estas deformaciones con la resistividad del material.
Para los metales se cumple:
Donde C es la constante de Bridgman (1,13 a 1,15 para galgas)
El volumen del resistor cilíndrico indicado al principio es:
Sustituyendo (8) en (7)
Sustituyendo (9) en (6)
De (1)
Sustituyendo (11) en (10)
Como es un cilindro:
Sustituyendo (14) en (12)
K se denomina factor de sensibilidad de la galga.
Si los cambios en un sensor resistivo puede ser expresados como
Finalmente como de (4)
Los principales problemas de las galgas son:
a. Cuidar el margen elástico.
b. El esfuerzo debe ser totalmente transversal a la galga.
c. La temperatura altera su valor.
Ejemplos de galgas:
Las galgas se pueden aplicar a:
a. Medida de fuerza.
b. Medida de presión.
c. Medida de desplazamientos pequeños.
d. Medida de vibración.
1.3. Termorresistencias (Variable térmicas)
Una termorresistencia es un dispositivo que varía su resistencia con la temperatura. Suele denominarse RTD (Resistive temperature detector) por sus siglas en ingles.
El símbolo que la caracteriza es:
El símbolo sin flecha indica que la variación es intrínseca por la característica resistiva, no por manipulación manual.
La ecuación característica de las termorresistencia es la siguiente:
Este dispositivo tiene como limitaciones.
* No puede medir temperaturas próximas a la de la fusión del conductor con que se fabrica.
* El autocalentamiento ocasionará derivas en la medición.
* S se deforma, puede cambiar su patrón de medición.
Tiene como ventaja el ser diez veces más sensible que los termopares, tal como se verá más adelante.
Normalmente no es necesario considerar todos los coeficientes de la ecuación (19), sino que considerando solo el primer término se tiene una excelente aproximación, es decir,
Donde α es la sensibilidad del material, y R0 es la resistencia a la temperatura de referencia (normalmente 0 grados).
En la tabla siguiente se muestran las Termorresistencias típicas:
La termorresistencia mas común por su linealidad es la de platino, que se suele denominar.
Pt100 (termorresistencia de platino con R0 =100 Ω a 0° C)
Pt1000 (termorresistencia de platino con R0 =1000 Ω a 0° C)
1.4. Termistores (Variables térmicas)
Los termistores también son resistencias que varían su magnitud con la temperatura. Se diferencian de las termorresistencia por que están basadas en semiconductores. Por tanto su característica no es lineal, aunque dentro de un margen adecuado pueda ser considerada de es amanera.
Su símbolo será:
La raya quebrada indica que no es lineal. El elemento positivo o negativo indica que tiene una característica positiva o negativa respectivamente. Es decir, si es de coeficiente positivo, PTC, la resistencia se incrementa con la temperatura. Si es de coeficiente negativo, NTC, disminuye con la temperatura.
En el caso de una NTC la ecuación característica será
Donde:
B = temperatura característica del material (2000 K a 5000 K)
R0 = Resistencia a la temperatura de referencia T0, normalmente la temperatura ambiente
(25 °C o 298 K)
Tiene como ventajas el ser más sensible que las Termorresistencias, más rápidas y permite hilos de conexión mayores.
Tiene como desventaja el ser no lineal, y al variar su temperatura por el autocalentamiento del material.
Los termistores tienen muchas aplicaciones algunos de los cuales son.
a. Medida directa de temperatura por variación de corriente:
b. Medida de caudal en circuito puente.
c. Protección por autocalentamiento.
1.5. Magnetorresistencias (Variable magnéticas)
Las magnetorresistencias se basan en la variación de resistencia en un conductor por variaciones en el campo magnético. Este efecto se denomina efecto magnetorresistivo y fue descubierto por Lord Kelvin en 1856
Este tipo de sensores tiene la ventaja con respecto a los sensores inductivos, por ser de orden cero, y con respecto a los sensores de efecto Hall por ser más sensible y proveer un mayor margen de medición de medición.
Está formada por una aleación de Hierro y Níquel (permalloy)
Tiene las siguientes aplicaciones:
* Medición de campos magnéticos en las lectoras de tarjetas.
* Otras magnitudes que provean un cambio en el campo magnético, como el desplazamiento de una pieza, detectores de proximidad, nivel de flotador, etc. En estos casos se utiliza un imán que cambia su posición con el proceso. El campo generado por el imán es medido por la magnetorresistencia.
1.6. Fotorresistencias (Variables ópticas)
Las fotorresistencias o LDR, es un dispositivo que cambia su resistencia por el nivel de incidencia de luz. Esta formada por materiales semiconductores.
Su símbolo:
1.7. Higrómetros resistivos (Variables químicas)
El higrómetro se utiliza para medir humedad. Se basan en la variación de resistencia que experimentan los materiales por la humedad, como el vapor de agua en un gas o el agua absorbida en un líquido o sólido.
Un material típico es el aislante eléctrico, el cual disminuye su resistencia al aumentar su contenido de humedad.
1.8. Acondicionamiento de sensores resistivos
Los sensores resistivos deben ser conectados a circuitos de interfaz adecuado para poder aprovechar o medir el parámetro variado.
Tradicionalmente no se suele medir la resistencia que varía, sino la variación de otro parámetro que depende de esta, como la tensión, la corriente o la frecuencia.
En este capítulo nos centraremos en los circuitos de interfaz tradicionales, dejando la salida casi-digital o digital a capítulos posteriores.
Los métodos de acondicionamiento se clasificarán en tres grupos:
a. Divisor de tensión.
b. Puente de Weatstone
c. Amplificadores para puente de sensores.
Si en forma general se representa la variación de resistencia en un sensor resistivo como;
El margen de variación de estos medidores puede representar se como:
Todos estos sensores necesitan una alimentación eléctrica y presentan el problema que el autocalentamiento influye en la medida.
1.8.1 Divisor de Tensión:
Un divisor de tensión es una interfaz formada por una combinación serie de un resistor y un sensor, alimentados por una fuente de fija de tensión o corriente. Puede darse el caso que el sensor forme conforme la asociación serie de estos dos dispositivos.
En la siguiente figura se puede observar la aplicación de esta interfaz al caso de potenciómetros.
La ecuación del circuito será:
Si K = Rm/Rn y α = 1-x, entonces
Esta ecuación demuestra que el sistema será lineal solo si K tiende a ∞, lo cual ocurrirá si Rm >> Rn
Antes de continuar se debe destacar que la no linealidad en si debe representar un error.
Por ejemplo, un sensor no lineal dará una respuesta no lineal que no debe ser interpretada como un error de medida. En cambio, si un sensor lineal modifica su característica de salida por culpa de la interfaz, entonces si se puede hablar de error. El caso actual es un ejemplo de este tipo de errores.
Para calcular este error, tomemos en cuenta que:
Valor ideal = Rm tiende a ∞, por tanto, K tiende a ∞, por lo que Vi = V(1-x)
Valor real o medido = Vm de la ecuación (24),
El error será:
El error será máximo cuando
El error absoluto a fondo escala será:
Puede observarse que el problema de esta interfaz se centra en el efecto de carga que introduce el medidor (Rm). Una forma de corregirlo es usando medidores con Rm muy grande.
Otra forma es usando una Rm adicional tal y como muestra la siguiente figura
¿Cuanto vale Vm, y el error de media?
Revisar según el libro
En el caso de que se quiera aplicar esta interfaz a termistores, será necesario utilizar un resistor en serie con el termistor, y medir la caída de tensión en este resistor, a fin de compensar en parte la no linealidad del sensor.
1.8.2. Puente de Wheatstone:
El puente de Wheatstone es un dispositivo orientado a corregir parte del problema que presenta la configuración anterior: Linealidad y sensibilidad.
Donde,
Si en el equilibrio se considera
Entonces,
Se ha obtenido una relación no lineal, lo cual será proporcional solo cuando x << r4 =" R5" r6 =" R7" 0 =" 8.85" r =" ε" m =" NI," l =" recorrido" a =" Área">
