TEMA V: SENSORES GENERADORES
5. Definición de sensores generadores
5.1. Sensores termoeléctricos: termopares
5.1.1. Efecto termoeléctrico
5.1.1.1 Efecto Peltier (Jean C. Peltier -1834)
5.1.1.2 Efecto Thompson (Lord Kelvin -1854)
5.2. Tipos de Termopares
5.3. Normas de aplicación practica por los Termopares
5.3.1. Ley de los circuitos homogéneos
5.3.2 Ley de los Metales Intermedios
5.3.3. Ley de las temperaturas sucesivas o intermedias
5.4 Efecto de la temperatura ambiente en la unión de referencia de los termopares.
5.4.1 Desviación térmica
5.4.2 Compensación de la unión de referencia en circuitos de termopares
5.5 SENSORES PIEZOELÉCTRICOS
5.5.1 Efecto piezoeléctrico.
5.5.2 Materiales
5.5.2.1 Aplicaciones
5.5.2.1.1 Detección de magnitudes mecánicas
5.5.3 SENSORES PIROELECTRICOS
5.5.3.1 Efecto Piro eléctrico
5.5.3.2 Materiales piroelectricos
5.5.3.3 Aplicaciones
5.5.4 SENSORES FOELECTRICOS
5.5.4.1 Espectro electromagnético
5.5.4.2 Fuentes de luz
5.5.4.2.1 Fuentes de luz habituales
5.5.4.3 Modulación de la fuente de la luz
5.5.4.4 Exceso de ganancia
5.5.5 Sensor de tipo Barreras emisor-receptor
5.5.5.1 Distancia de censado
5.5.5.2 Alineación
5.5.5.3 Interferencia mutua
5.5.5.4 Montaje de la barrera
5.5.6 Barreras reflectivas
5.5.6.1 Principio de funcionamiento
5.5.6.2 Distancia de censado
MEDICIONES INDUSTRIALES
TEMA V: SENSORES GENERADORES
5. Definición de sensores generadores
Se consideran sensores Generadores aquellos que generan una señal eléctrica a partir de la magnitud que miden, sin necesidad de una alimentación eléctrica.
Esto es una alternativa para medir muchas de las magnitudes ordinarias como por ejemplo: temperatura, fuerza, presión, y otras magnitudes afines.
En algunos casos: Transductor ⇔ Efecto Reversible
En esta parte se toma en cuenta las fuentes de Interferencia cuyos efectos pueden producirse inadvertidamente en los circuitos.
Ejemplos:
• Ruidos (Mecánicos, Magnéticos, Eléctricos, Térmicos, Electrónicos).
• Fuerzas Electromotrices.
• Vibraciones.
• Presencia de Dieléctricos o Potenciales galvánicos.
5.1. SENSORES TERMOELECTRICOS: TERMOPARES
Tipos:
a) Reversibles: Efecto Peltier.
Efecto Thompson.
b) Irreversibles: Efecto Joule.
Históricamente, fue Thomas J. Seebeck quien descubrió en 1822 que en un circuito de dos metales distintos A y B con dos uniones a diferentes temperaturas, aparece una corriente eléctrica.

Es decir hay una conversión de Energía Térmica a Energía Eléctrica o bien, si se abre el circuito, una fuerza (termo - electromotriz) que depende de los metales y de la diferencia de temperaturas entre las uniones. Al conjunto de estos dos metales distintos con una unión firme en un punto o una zona se le denomina Termopar
La relación entre la fuerza termo electromotriz (f.t.e.m.) denominada también EAB y la diferencia de temperatura entre las uniones (T), define el coeficiente de Seebeck (SAB).
En general SAB no es una constante. Esta depende de la temperatura T y suele crecer al crecer T.
Es importante anotar que mientras la corriente que circula por el circuito depende de la resistencia de los conductores, en cambio la ftem no depende de la resistividad, ni de la sección, ni distribución o gradiente de temperatura. Depende solo de la diferencia de temperaturas entre las uniones y de la naturaleza de los metales. Esta fuerza electromotriz se debe a los efectos
Peltier y Thompson.
5.1.1.1 Efecto Peltier (Jean C. Peltier -1834)

Este efecto es reversible e independiente del contacto, es decir, de la forma y dimensiones de los conductores. Depende solo de su composición y de la temperatura de la unión.
La dependencia es lineal y viene descrita por el coeficiente de Peltier πAB que se define como el calor generado en la unión entre A y B por unidad de corriente que circula de B a A para una unión a temperatura T, y esta definido por:
π AB = T (S B - S A) = - π BA
El hecho de que el calor intercambiado por unidad de superficie de la unión sea proporcional a la corriente y no a su cuadrado, marca la diferencia respecto al efecto Joule. En este el calentamiento depende del cuadrado de la corriente y no cambia al hacerlo su dirección.
El efecto Peltier, es también independiente del origen de la corriente, que puede ser, incluso de origen termoeléctrico. En este caso las uniones alcanzan una temperatura distinta a la del ambiente y ello puede ser una fuente de errores.
5.1.1.2 Efecto Thompson (Lord Kelvin -1854)
Consiste en la absorción o liberación de calor por parte de un conductor homogéneo con temperatura No homogénea por el que circule corriente.
El calor liberado es proporcional a la corriente - no a su cuadrado- y por ello cambia el signo al hacerlo el sentido de la corriente. Se absorbe calor al fluir corriente del punto frío al más caliente y se libera cuando fluye del más caliente al más frío. En otras palabras, se absorbe calor si la corriente y el calor fluyen en direcciones opuestas y se libera calor si fluyen en la misma dirección.
A pesar de todas las limitaciones, los termopares son sin duda alguna los transductores de uso más frecuente para medir temperatura:
Ventajas:
• Gran Alcance: -270°C a 3000°C.
• Gran Estabilidad. .Alat fiabilidad.
• Mayor exactitud que un RTD.
• Pequeño y mediano tamaño.
• .Velocidad de respuesta rápida (ms).
• Robustos.
• Simples.
• Flexibilidad de Utilización.
• Bajo costo.

5.2. Tipos de Termopares
En las uniones de termopar interesa tener:
• Resistividad elevada sin requerir mucha masa
• Coeficiente de temperatura débil en la resistividad;
• Resistencia a la oxidación a temperaturas altas.
• Linealidad lo mayor posible.
Para lograr estas propiedades se emplean aleaciones especiales:
• Níquel (90)/Cromo (IO) -Crome-;
• Cobre (57)1Niquel (43);
• Níquel (94)1 Aluminio (2)-Manganeso (3)-Silicio (I) -Alumel-

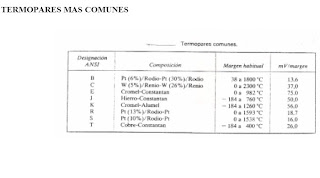
La protección frente al ambiente se logra mediante un encapsulado denominado Vaina que normalmente es acero inoxidable. La velocidad de respuesta y la robustez de la sonda vendrán afectadas por el espesor del encapsulado. En el cuadro siguiente se presentan las características de algunos de los termopares más comunes y su designación de acuerdo con las normas ANSI.
 Las características completas en cuanto a tensión de salida se encuentran tabuladas de forma que se dan las tensiones correspondientes a distintas temperaturas y cuando la unión de referencia esta a 0,00°C. Esto no significa que la unión a 0,00°C de siempre una tensión de 0v para cualquier termopar. En el siguiente cuadro se muestra un fragmento de una tabla donde las tensiones o temperaturas intermedias se obtienen mediante interpolación lineal.
Las características completas en cuanto a tensión de salida se encuentran tabuladas de forma que se dan las tensiones correspondientes a distintas temperaturas y cuando la unión de referencia esta a 0,00°C. Esto no significa que la unión a 0,00°C de siempre una tensión de 0v para cualquier termopar. En el siguiente cuadro se muestra un fragmento de una tabla donde las tensiones o temperaturas intermedias se obtienen mediante interpolación lineal.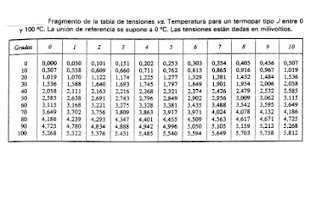


En un sistema automático se pueden emplear polinomios que aproximan las tablas con una exactitud dependiendo de su orden. Corresponden a expresiones del tipo:
T = ao + al X + a2 x2 +.....................
Donde X es la tensión obtenida.
Según la aplicación, se dispone de distintos tipos de uniones como las especificadas en la figura siguiente:
• Uniones Desnudas (medidas estáticas, gases no corrosivos, donde se requiere un tiempo de respuesta rápido).
• Uniones Aisladas (medir en ambientes corrosivos donde interesen aislamientos eléctricos del termopar, este entonces queda encerrado por el encapsulado (Vaina) y aislado de esta por un buen conductor térmico como aceite o mercurio).
• Uniones con Aislantes Minerales (respuesta rápida y no hace falta un encapsulado grueso se emplean aislantes minerales como polvo de manganeso y oxido de aluminio.

Según el grado de compactación del aislante, la respuesta final puede ser lenta y la temperatura máxima soportada es también distinta. Mediante uniones puestas a masa se pueden medir temperaturas estáticas o de flujo de gases o líquidos corrosivos y como la unión esta soldada a ala vaina protectora la repuesta térmica es más rápida, pero si la masa es ruidosa no sirve y hay que aislar térmicamente el termopar. Los termopares aislados se aplican en medidas de alta presión.
5.3. Normas de aplicación practica por los Termopares
La medición de temperaturas mediante termopares, además de las ventajas e inconvenientes expuestos esta sujeta a una serie de leyes verificadas experimentalmente, que simplifican en gran manera el análisis de circuitos con termopares.
5.3.1. Ley de los circuitos homogéneos
En un circuito de un único metal homogéneo no se puede mantener una corriente termoeléctrica mediante la aplicación exclusiva de calor aunque se varíe la sección transversal del conductor.

En la Figura anterior las temperaturas T3 y T 4 no cambian la energía termo electromotriz (ftem) debida a T1 y T2 en particular, si T1 es igual a T2 y se calientan A ó B no fluye corriente alguna.
Es decir en otras palabras las temperaturas intermedias a las que puede estar sometido cada conductor no altera la ftem. Tampoco ocurre esto debido a una determinada diferencia de temperaturas entre las uniones Sin embargo, esto no significa que si hay distintas temperaturas a lo largo de un circuito se tengan que emplear necesariamente hilos de extensión largos iguales a los del termopar. Para esto se emplean los denominados cables de compensación, los cuales son de metales que, siendo más económicos que los de termopares utilizados frecuentemente en la industria no presentan ftem. significativas
5.3.2 Ley de los Metales Intermedios
La suma algebraica de las ftem en un circuito compuesto de un número cualesquiera de metales distintos es cero. Si todo el circuito está a una temperatura uniforme.
Esto significa que se puede intercalar un instrumento de medida, sin añadir errores, siempre y cuando las nuevas uniones estén a la misma temperatura. El instrumento se puede intercalar en un conductor o en un a unión. Un colorario de estas leyes que si se conoce la relación térmica de dos metales distintos con un tercero. Se puede encontrar la relación entre los dos primeros. Por lo tanto no hace falta calibrar todos los posibles pares de metales para conocer la temperatura correspondiente a 1a ftem. detectada con un par determinado. Basta con conocer su comportamiento con un tercero. Se ha convenido en tomar el Platino como referencia.

5.3.3. Ley de las temperaturas sucesivas o intermedias.
Si dos metales homogéneos producen un ftem. E1 cuando las uniones están a T1 y T2 y una ftem.
E2, cuando las uniones están a T2 y T3, la ftem. cuando las uniones estén a T1 y T3 será (E1 + E2).
Esto significa, por ejemplo, que la unión de referencia no tiene porque estar a ooc si no que puede usarse otra temperatura de referencia.
En el caso (a) se trata de la conexión serie de varios termopares, constituyendo lo que se denomina una termopila. Es fácil comprobar que aumenta la sensibilidad respecto al caso de un soto termopar. En el caso (b) la conexión es en paralelo, y se detecta la temperatura media si todos los termopares son lineales en el margen de medida y tiene la misma resistencia.
5.4 Efecto de la temperatura ambiente en la unión de referencia de los termopares.
5.4.1 Desviación térmica
Al calentar la masa de los termopares se extrae energía que afectará a la temperatura que se trata determinar. Considérese por ejemplo, medir la temperatura de un líquido en un tubo de ensayo: existen dos problemas potenciales. El primero es que la energía del calor viajará hasta el cable del termopar y se disipará hacia la atmósfera reduciendo así la temperatura del líquido alrededor de los cables. Un problema similar puede ocurrir si un termopar no está suficientemente inmerso en el líquido, debido a un ambiente de temperatura de aire más frío en los cables, la conducción térmica puede causar que la unión del termopar esté a una temperatura diferente del líquido mismo. En este ejemplo, un termopar con cables más delgados puede ser útil, ya que causará un gradiente de temperatura más pronunciado a lo largo del cable del termopar en la unión entre el líquido y el aire del ambiente. Si se emplean termopares con cables delgados, se debe prestar atención a la resistencia de la guía. El uso de un termopar con delgados cables conectado a un termopar de extensión mucho más gruesa a menudo ofrece el mejor resultado.
5.4.2 Compensación de la unión de referencia en circuitos de termopares
Para aplicar et efecto Seebeck a la medida de temperatura es necesario mantener una de las uniones a una temperatura de referencia. Una solución consiste en disponer la unión de referencia en hielo fundente. Tal como se indica en la figura siguiente:

Es una solución de gran exactitud y facilidad de montaje pero es de difícil mantenimiento y coste alto. Se puede mantener también la unión de referencia a una temperatura constante a base de emplear un elemento de refrigeración basado en el efecto Peltier inverso o un horno termostatado, pero en cualquier caso debe usarse mucho hilo de uno de los dos metales del termopar y esto encarece la solución.
La solución indicada en las figuras siguiente permite emplear un hilo de conexión más económico (cobre). Si bien sigue siendo una solución cara por la necesidad de mantener una temperatura de referencia constante. Si el margen de variación de la temperatura ambiente es menor que la resolución deseada puede dejarse la unión de referencia simplemente al aire. En caso contrario se emplea la denominada compensación electrónica de la unión de referencia.
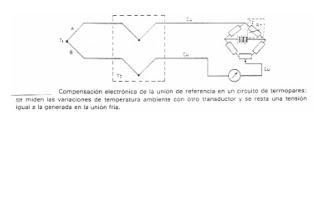
La Compensación electrónica consiste en dejar que la unión de referencia sufra las variaciones de la temperatura ambiente, pero esta se detecta con otro transductor de temperatura. Dispuesto en la vecindad de la unión de' referencia, y se resta una tensión igual a la generada en la unión fría.
La tensión de alimentación del puente debe de ser estable, y puede ser la de una pila de mercurio.
 5.5 SENSORES PIEZOELÉCTRICOS
5.5 SENSORES PIEZOELÉCTRICOS
5.5.1 Efecto piezoeléctrico.
* El efecto piezoeléctrico consiste en la aparición de una polarización eléctrica en un material al deformarse bajo la acción de un esfuerzo.
* Es un efecto reversible.
* Todos los materiales ferro eléctricos son piezoeléctricos. La propiedad piezoeléctrica está relacionada con la estructura cristalina.
5.5.2 Materiales
* Naturales más comunes: El cuarzo y la turmalina.
* Sintéticos: ceraminas.

5.5.2.1 Aplicaciones.
5.5.2.1.1 Detección de magnitudes mecánicas
Limitaciones:
* No poseen respuesta en c.c.
* Deben trabajar por debajo de la frecuencia de resonancia del material.
* Los coeficientes piezoeléctricos son sensibles a la temperatura.(Cuarzo hasta 260ºC y la turmalita 700ºC).
* La impedancia de salida de los materiales piezoeléctricos es muy baja
* Algunos materiales piezoeléctricos son delicuescentes.
Ventajas:
*Alta sensibilidad y bajo costo.
* Alta rigidez mecánica (deformaciones experimentadas <>
* La figura 6.18 muestra algunos montajes de aplicación del efecto piezoeléctrico a baja frecuencia.

5.5.3 SENSORES PIROELECTRICOS
5.5.3.1 Efecto Piro eléctrico
El efecto piro eléctrico es análogo al piezoeléctrico, pero en lugar de la aparición de cargas eléctricas cuando se deforma un material, aquí se trata de la aparición de cargas en una dirección determinada cuando el material experimenta un cambio de temperatura. Estas cargas son debidas al cambio de su polarización espontanea al variar la temperatura. Recibió ese nombre de D. Brewster en 1824, pero es conocido desde hace más de 2000 años.
Si el cambio de temperatura ΔT, es uniforme en todo el material, el efecto piro eléctrico se describe mediante el coeficiente piro eléctrico p, que es un vector de la forma:
ΔQ= A ΔP= PaΔt
Donde P es la polarización espontanea. Este efecto se a plica sobre todo a la detección de radiación térmica a temperatura ambiente. Para ello se disponen dos electrodos metálicos en dirección perpendicular a la de polarización, formándose un condensador que actúa como sensor térmico. Cuando el detector absorbe radiación cambia su temperatura y con ella su polarización, produciendo una carga superficial en las placas del condensador. Si el área donde incide la radiación es A y el grosor del detector b, es suficientemente pequeño para poder suponer que los gradientes de temperatura en el son despreciables, la carga inducida será:
ΔQ = A ΔP = pAΔT
Donde ΔT es el incremento de temperatura experimentado por el detector. La tensión obtenida será:
V0= ΔQ/C = ΔQ (b/εA)= (pb/ε) ΔT
Cuando la radiación incidente es pulsante y tiene una potencia Pi, la tensión obtenida en el condensador es:
V0 =Rv*Pi
Donde Rv es la denominada responsividad o sensibilidad en tensión y viene dada por:
Rv= (α*p*τ/CE*εa(1+ω2*τ2)1/2) (V/W)
Donde:
α= es la fracción de la potencia incidente que se convierte en calor
p= es el coeficiente piroelectrico del material
τ= es la contante de tiempo térmica
CE= es el calor especifico volumétrico
ε= es la constante dieléctrica
ω= es la pulsación de la radiación incidente
La dependencia frecuencial de R, es, pues, de tipo bajo. Para sensores comerciales decrece a partir de las frecuencias del orden de 0.1Hz. La corriente de cortocircuito equivalente es
Ic=RiPi
Donde Ri es la responsividad en corriente, que viene dada por
Rv= ((α*p *ω *τ)/ (CE*b (1+ω2*τ2)1/2)(A/W)
Ri es plana para radiaciones de frecuencial mayor que la determinada por la contante térmica del material. Como todos los detectores de radiación, los piroelectricos son también sensibles al ruido térmico. La potencia equivalente de entrada para la que la respuesta, es un ancho de banda de 1 Hz, es igual a la debida a las flutuaciones térmicas del detector, se denomina potencia equivalente de ruido. Para un detector ideal de área A*cm2, a temperatura ambiente es del orden de 5.5*10-11 √AW/√Hz.
5.5.3.2 Materiales piroelectricos
Dado que la piroelectricidad, al igual que la piezoelecrticidad, se basa en la anisotropía de los cristales, muchos materiales piezoeléctricos son también piro eléctricos. De las 21 clases cristalográficas no centrosimetricas, 10 tienen eje polar de simetría. Todas estas son ripoelectricas.
Hay dos grupos de materiales piros eléctricos: los lineales y los ferros eléctricos. En los primeros, la polarización no se puede cambiar a base de invertir el sentido del campo eléctrico. Están en este grupo, entre otros, la turmalina, el sulfato de litio, y los sulfatos de cadmio y selenio. Entre los ferreoelectricos están el tantalado de litio, el niobato de estroncio y bario, el titanato-circonato de plomo y el sulfato de triglicina (TGS). Aparte están los polímeros como el polivinilideno
5.5.3.3 Aplicaciones
Según lo expuesto, la aplicación mas inmediata del efecto piro eléctrico en sensores es la detección de radiación térmica a temperatura ambiente. En consecuencia, se ha aplicado en pirómetros (medida de temperatura a distancia en hornos, vidrio o metal fundido, o simplemente para determinar las perdidas de calor en edificios), radiómetros(medida de la potencia generada por una fuente de radiación), analizadores de IR, detectores de CO2 y otros gases que absorben la radiación IR, detección de la radiación IR emitida por el cuerpo humano(para detección de intrusos y de presencia en sistemas en sistemas de encendido automático de la iluminación o calefacción en viviendas, apertura de puertas, reclamos publicitarios), detección de pulsos laser de alta potencia y en termómetros de alta resolución (6*106 oC).
Para evitar que la carga superficial inducida en los electrodos por el cambio de temperatura del detecto al absorber radiación sea neutralizada por las cargas parasitas, se modula la radiación incidente o bien se da un cierto cabeceo al detector. Por su pequeño tamaño y alta sensibilidad a cambios de temperatura, su respuesta es más rápida que la de otros detectores térmicos (termopares, termistores), pues no es necesario que alcancen el equilibrio térmico con la fuente de radiación. Esto los hace apropiados para obtener imágenes mediante exploración de la superficie a detectar. Otra posibilidad para compensar las cargas debidas a los cambios de temperatura ambiente, es utilizar dos sensores conectados en serie con polaridades opuestas.
El detector puede estar suspendido libremente, soportado por papel Mylar o montado sobre un sustrato que sea conductor o aislante térmico. Dado que los materiales piro eléctricos son todos piezoeléctricos, estos detectores llevan un encapsulado hermético (a veces incluso con vacio interno) que reduce los efectos de los movimientos de aire
5.5.4 SENSORES FOELECTRICOS
Un Sensor fotoeléctrico es un dispositivo electrónico que responde al cambio en la intensidad de la luz. Estos sensores requieren de un componente emisor que genera la luz, y un componente receptor que ve la luz generada por el emisor.
Todos los diferentes modos de censado se basan en este principio de funcionamiento. Están diseñados especialmente para la detección, clasificación y posicionado de objetos; la detección de formas, colores y diferencias de superficie, incluso bajo condiciones ambientales extremas.
Conceptos teóricos
5.5.4.1 Espectro electromagnético
Atendiendo a su Longitud de onda la Radiación electromagnética recibe diferentes nombres. Desde los energéticos rayos gamma (con una longitud de onda del orden de pico metros) hasta las ondas de radio (longitudes de onda del orden de varios kilómetros) pasando por la Luz visible cuya Longitud de onda está en el rango de las décimas de micra. El rango completo de longitudes de onda forma el espectro electromagnético, del cual la luz visible no es más que un minúsculo intervalo que va desde la longitud de onda correspondiente al violeta (380 nm) hasta la longitud de onda del rojo (780 nm).
Los colores del espectro se ordenan como en el arco iris, formando el llamado espectro visible.
Si hablamos de luz en sentido estricto nos referimos a radiaciones electromagnéticas cuya longitud de onda es capaz de captar el ojo humano, pero técnicamente, el ultravioleta, las ondas de radio o las microondas también son luz, pues la única diferencia con la luz visible es que su longitud de onda queda fuera del rango que podemos detectar con nuestros ojos; simplemente son colores que nos resultan invisibles, pero podemos detectarlos mediante instrumentos específicos.
5.5.4.2 Fuentes de luz
Hoy en día la mayoría de los sensores fotoeléctricos utilizan LED como fuentes de luz. Un LED es un semiconductor, eléctricamente similar a un diodo, pero con la característica de que emite luz cuando una corriente circula por él en forma directa.
Los LEDs pueden ser construidos para que emitan en verde, azul, amarillo, rojo, infrarrojo, etc. Los colores más comúnmente usados en aplicaciones de censado son rojos e infrarrojos, pero en aplicaciones donde se necesite detectar contraste, la elección del color de emisión es fundamental, siendo el color más utilizado el verde.
Los fototransistores son los componentes más ampliamente usados como receptores de luz, debido a que ofrecen la mejor relación entre la sensibilidad a la luz y la velocidad de respuesta, comparado con los componentes foto resistivos, además responden bien ante luz visible e infrarroja.
Las fotocélulas son usadas cuando no es necesaria una gran sensibilidad, y se utiliza una fuente de luz visible. Por otra parte los fotodiodos donde se requiere una extrema velocidad de respuesta.
5.5.4.2.1 Fuentes de luz habituales
No visible, son relativamente inmunes a la luz ambiente artificial. Generalmente se utilizan para detección en distancias largas y ambientes con presencia de polvo.
Al ser visible es más sencilla la alineación. Puede ser afectado por luz ambiente intensa, y es de uso general en aplicaciones industriales.
Al ser visible es más sencilla la alineación. Puede ser afectado por luz ambiente intensa, generalmente se utiliza esta fuente de luz para detección de marcas.
5.5.4.3 Modulación de la fuente de la luz
Con la excepción de los infrarrojos, los LEDs producen menos luz que las fuentes incandescentes y fluorescentes que comúnmente iluminan el ambiente. La modulación de la fuente de luz provee el poder de censado necesario para detectar confiablemente con esos bajos niveles de luz. Muchos de los sensores fotoeléctricos utilizan LEDs emisores de luz modulada y receptores fototransistores.
Los LEDs, pueden estar encendidos y apagados (o modulados) con una frecuencia que normalmente ronda un kilohercio. Esta modulación del LEDs emisor hace que el amplificador del fototransistor receptor pueda ser conmutado a la frecuencia de la modulación, y que amplifique solamente la luz que se encuentre modulada como la que envía el emisor. La operación de los sensores que no poseen luz modulada está limitada a zonas donde el receptor no reciba luz ambiente y sólo reciba la luz del emisor.
Un receptor modulado ignora la presencia de luz ambiente y responde únicamente a la fuente de luz modulada.
Los LEDs infrarrojos son los más efectivos y son, además, los que tiene el espectro que mejor trabajan con los fototransistor es; es por tal motivo que son usados en muchas aplicaciones. Sin embargo, los sensores fotoeléctricos son también utilizados, para detectar contraste (detección de marcas) o color, y para esto se requiere que la luz sea visible.
5.5.4.4 Exceso de ganancia
La curva de exceso de ganancia se especifica en cada tipo de sensor fotoeléctrico, y la misma está en función de la distancia de censado. Esta curva es usada al momento de seleccionar el sensor, para predecir la confiabilidad de la detección en un ambiente conocido.
5.5.5 Sensor de tipo Barreras emisor-receptor
Las barreras tipo emisor-receptor están compuestas de dos partes, un componente que emite el haz de luz, y otro componente que lo recibe. Se establece un área de detección donde el objeto a detectar es reconocido cuando el mismo interrumpe el haz de luz.
Debido a que el modo de operación de esta clase de sensores se basa en la interrupción del haz de luz, la detección no se ve afectada por el color, la textura o el brillo, pero si en el caso de los objetos transparentes, estos son muy difíciles de detectar para este tipo de sensores del objeto a detectar. De todos modos el tamaño del objeto debe ser tomado en cuenta ya que algunos modelos de barreras emisor-receptor tienen ajuste de sensibilidad para permitir la detección o no de objetos de diferentes tamaños.
Los sensores de tipo barrera, es por mucho la primera y mejor opción que uno tendría que revisar por lo siguiente:
Larga distancia de detección.
Detección confiable en ambientes sucios, con polvo o con mucha humedad.
No son tan fácilmente engañados por objetos brillantes.
Detección de objetos pequeños con alta repetitividad.
Las contras pueden ser:
El precio ya que se compone de 2 partes.
Tiempo de montaje ya que tienen que montarse 2 partes y se tienen que alinear.
5.5.5.1 Distancia de censado
La distancia de censado mostrada en los catálogos para barreras emisor-receptor indica la máxima distancia entre el componente emisor y el receptor de manera tal que el sensor opere de forma estable. Dependiendo de la familia de sensores a utilizar, dicha distancia puede variar desde unos cuantos milímetros hasta 50 metros aproximadamente.
5.5.5.2 Alineación
Estos sensores operan de una manera precisa cuando el emisor y el receptor se encuentran alineados. Esto se debe a que la luz emitida siempre tiende a alejarse del centro de la trayectoria.
5.5.5.3 Interferencia mutua
Cuando se utilizan dos pares de barreras emisor-receptor una muy cerca de la otra, la expansión del haz de luz puede cubrir ambos receptores. Esto puede causar problemas de censado. En el diagrama puede verse el haz de luz exagerado para comprender con claridad, en la práctica, la expansión del haz de luz es mucho menor.
Si el objeto a detectar interrumpe el haz de luz entre el emisor 2 y el receptor 2, el haz de luz sigue siendo recibido desde el emisor 1. Efectivamente el objeto no es detectado.
Para solucionar este inconveniente no se debe re posicionar los sensores de manera tal que queden enfrentados los dos emisores. Esto permite que el haz de luz incida únicamente en el receptor correspondiente.
5.5.5.4 Montaje de la barrera
Las superficies brillantes que se encuentren cercanas al área de detección pueden reflejar el haz de luz provocando errores en la detección del objeto.
Si esto sucede, con solamente alejar el sensor de la superficie brillante el problema estará solucionado.
Si el producto a detectar es brillante, se puede sacar provecho de esta característica, re posicionando el sensor de manera diferente. En este caso la presencia de la tapa del envase es detectada haciendo reflejar el haz de luz en la misma.
5.5.6 Barreras reflectivas
5.5.6.1 Principio de funcionamiento
A diferencia de las barreras emisor-receptor, las barreras reflectivas o barreras reflex, tienen el componente emisor y el componente receptor en un solo cuerpo. El haz de luz se establece mediante la utilización de un reflector catadióptrico.
El objeto es detectado cuando el haz formado entre el componente emisor, el reflector y el componente receptor es interrumpido. Debido a esto, la detección no es afectada por el color del mismo.
La ventaja de las barreras réflex es que el cableado es en un solo lado, a diferencia de las barreras emisor-receptor que es en ambos lados.
5.5.6.2 Distancia de censado
La distancia total de censado mostrada en los catálogos está basada en la máxima distancia entre el sensor y el reflector de manera tal que el sensor detecte establemente el objeto.
La distancia efectiva de censado es levemente menor que la distancia total de censado, debido a la zona muerta que queda establecida justo enfrente del sensor. Esto se debe a la separación que existe entre el componente emisor y el componente receptor y el ángulo al cual la luz es reflejada desde el reflector.

No hay comentarios:
Publicar un comentario